|
Hogyun Kim
I'm a PhD student in the Department of Electrical and Computer Engineering at Inha University, advised by Younggun Cho in SPARO Lab.
I also received my B.S. in Naval Architecture and Ocean Engineering from Inha University.
My research focuses on scalable and collaborative robot autonomy in multi-robot systems, studying how robots perceive, map, and operate in shared environments through communication-efficient coordination and interaction.
Email /
CV /
LinkedIn /
Scholar /
Github
|

|
News
- [26.03.12] Selected a student representative on the Safety, Security, and Rescue Robotics (SSRR) community
- [26.03.03] Submitted one paper to IEEE/RSJ IROS 2026 (1st Author)
- [26.02.10] Submitted one paper to IEEE T-FR 2026 (1st Author)
- [26.02.01] Accepted one paper to IEEE ICRA 2026 (2nd Author)
- [26.01.23] Awarded the Silver Prize in 32nd Samsung Humantech Paper Award (1st Author)
- [26.01.16] Submitted one paper to IJRR 2026 (1st Author)
- [25.08.29] Awarded Ph.D Candidate Research Fellowship in NRF (Principal Investigator)
- [25.08.05] Invited for IEEE T-FR Special Issue (1st Author)
- [25.06.16] Accepted one paper to IEEE/RSJ IROS 2025 (2nd Author)
- [25.06.01] Accepted one paper to IEEE T-IV 2025 (2nd Author)
- [25.04.30] Selected for Spotlight Talk at ICRA 2025 Workshop on Field Robotics (1st Author)
- [25.01.28] Accepted two papers to IEEE ICRA 2025 (Co-Author)
- [24.09.18] Accepted one paper to IEEE RA-L 2024 (1st Author)
- [24.07.22] Accepted one paper to IEEE RA-L 2024 (1st Author)
- [24.05.13] Awarded Best Paper Award (3rd Place) at ICRA 2024 Workshop on Future of Construction (2nd Author)
- [23.05.16] Accepted one paper to IEEE ICRA 2024 Workshop on Radar in Robotics (1st Author)
- [24.01.09] Accepted one paper to IEEE Sensors Letters 2024 (1st Author)
- [23.05.16] Accepted one paper to IEEE ICRA 2023 Workshop on Future of Construction (1st Author)
- [23.01.17] Accepted one paper to IEEE ICRA 2023 (1st Author)
- [22.08.10] Accepted one paper to IEEE IROS 2022 Late-Breaking (1st Author)
|
Research
My research interests lie in multi-robot systems spanning both robot autonomy and interaction.
To date, my work has focused on multi-robot SLAM and place recognition for shared environmental perception, with an emphasis on communication-efficient knowledge mapping and sharing.
Building on this foundation, I am expanding my research toward interactive and collaborative multi-robot systems that integrate perception, planning, and coordination.
Some papers are highlighted.
|
|
Commerge: Communication-Efficient, Robust and Fast LiDAR Map Merging Framework for Multi-Robot Coordination in Resource-Constrained Scenarios
Hogyun Kim,
Jiwon Choi,
Juwon Kim,
Geonmo Yang,
Seokhwan Jeong,
Hyungtae Lim,
Younggun Cho
IJRR submitted, 2026
Under Review
[TL;DR] Communication-Efficient Multi-Robot Map Merging Framework
|
|
KISS-IMU: Self-supervised Inertial Odometry with Motion-balanced Learning and Uncertainty-aware Inference
Jiwon Choi,
Hogyun Kim,
Geonmo Yang,
Juhui Lee,
Younggun Cho
ICRA, 2026
Accepted to Appear
[TL;DR] Self-Supervised Inertial Odometry (IO)
|
|
MARSCalib: Multi-robot, Automatic, Robust, Spherical Target-based Extrinsic Calibration in Field and Extraterrestrial Environments
Seokhwan Jeong,
Hogyun Kim,
Younggun Cho
IROS, 2025
project page /
arXiv /
paper /
code /
youtube
[TL;DR] Multi-Robot, Spherical Target-based LiDAR-camera Calibration
|
|
Uni-Mapper: Unified Mapping Framework for Multi-modal LiDARs in Complex and Dynamic Environments
Gilhwan Kang,
Hogyun Kim,
Byunghee Choi,
Seokhwan Jeong,
Youngsik Shin,
Younggun Cho
T-IV, 2025
project page /
arXiv /
paper /
code /
youtube
[TL;DR] Multi-Robot and Multi-Modal LiDARs Mapping Framework
|

|
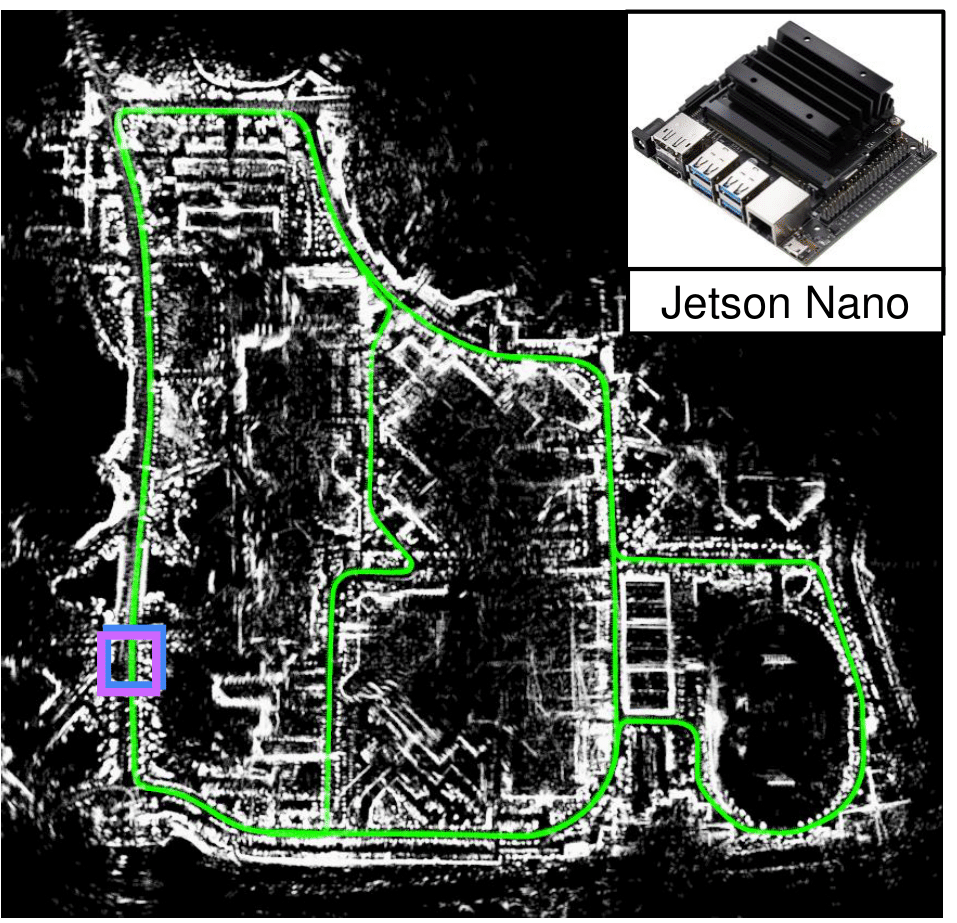
SKiD-SLAM: Robust, Lightweight, and Distributed Multi-Robot LiDAR SLAM in Resource-Constrained Field Environments
Hogyun Kim,
Jiwon Choi,
Juwon Kim,
Geonmo Yang,
Dongjin Cho,
Hyungtae Lim,
Younggun Cho
ICRA workshop on Field Robotics (spotlight talk), 2025
project page /
arXiv /
code
[TL;DR] Multi-Robot and Distributed LiDAR SLAM Framework
|

|
DiTer++: Diverse Terrain and Multi-modal Dataset for Multi-Robot SLAM in Multi-session Environments
Juwon Kim,
Hogyun Kim,
Seokhwan Jeong,
Youngsik Shin,
Younggun Cho
ICRA, 2025
project page /
arXiv /
paper /
code /
download link /
youtube
[TL;DR] Multi-Robot and Multi-Modal Dataset
|
|
PoLaRIS Dataset: A Maritime Object Detection and Tracking Dataset in Pohang Canal
Jiwon Choi,
Dongjin Cho,
Giheyon Lee,
Hogyun Kim,
Geonmo Yang,
Joowan Kim,
Younggun Cho
ICRA, 2025
project page /
arXiv /
paper /
code /
download link /
youtube
[TL;DR] Object Detection and Tracking Dataset in Maritime
|
|
ReFeree: Radar-based Lightweight and Robust Localization using Feature and Free space
Hogyun Kim*,
Byunghee Choi*,
Euncheol Choi,
Younggun Cho
RA-L, 2024
project page /
arXiv /
paper /
code /
youtube
[TL;DR] Lightweight Radar Place Recognition
|
|
Narrowing your FOV with SOLiD: Spatially Organized and Lightweight Global Descriptor for FOV-constrained LiDAR Place Recognition
Hogyun Kim,
Jiwon Choi,
Taehu Sim,
Giseop Kim,
Younggun Cho
RA-L, 2024
project page /
arXiv /
paper /
code /
youtube
[TL;DR] Lightweight LiDAR Place Recognition
|
|
DiTer: Diverse Terrain and Multimodal Dataset for Field Robot Navigation in Outdoor Environments
Seokhwan Jeong*,
Hogyun Kim*,
Younggun Cho
IEEE Sensors Letters, 2024
project page /
paper /
download link /
youtube
[TL;DR] Multi-Modal Legged Robot Datasets
|
|
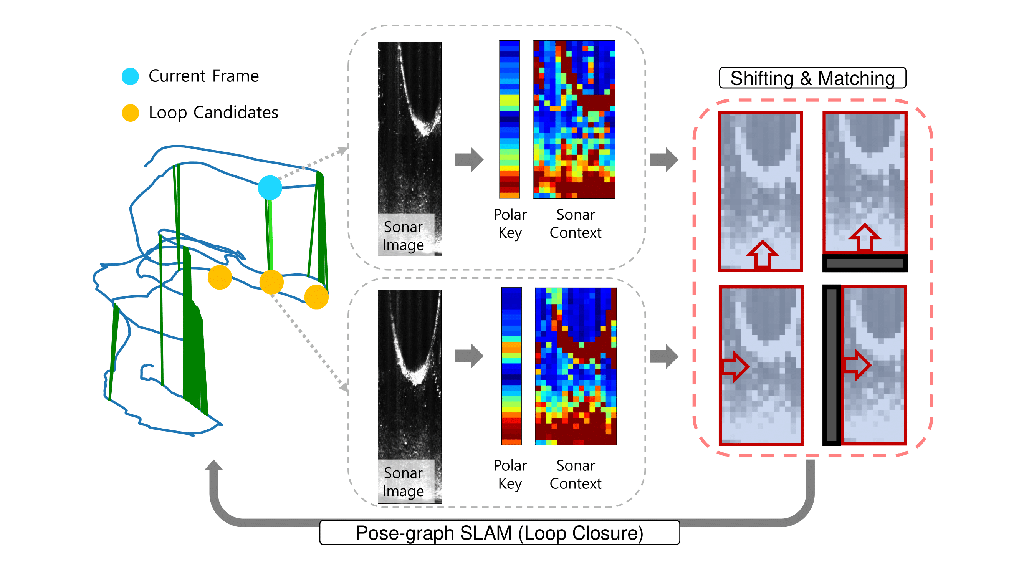
Robust Imaging Sonar-based Place Recognition and Localization in Underwater Environments
Hogyun Kim,
Gilhwan Kang,
Seokhwan Jeong,
Seungjun Ma,
Younggun Cho
ICRA, 2023
project page /
arXiv /
paper /
code /
youtube
[TL;DR] Sonar Place Recognition in Underwater
|
|
Presentation
|
IEEE RAS Summer School on Multi-Robot Systems, 2024
ICROS OS on Robotics and AI Tech. for Space and Extreme Environments, 2024
KRoC OS on Cutting-Edge Tech. and App. for Autonomous Multi-Robot/Agent Collabo, 2025
|
|
Academic Service
|
Reviewer, IJRR 2025
Reviewer, RAL 2024, 2025, 2026
Reviewer, ICRA 2026
Reviewer, IROS 2025
Reviewer, IEEE JOE 2025
|
Feel free to steal this website's source code. Do not scrape the HTML from this page itself, as it includes analytics tags that you do not want on your own website — use the github code instead. Also, consider using Leonid Keselman's Jekyll fork of this page.
|
|